أجزاء الميكروكونترولر والمصطلحات الأساسية:
منتديات الهندسة الكهربية والإلكترونية والميكاترونكس والكومبيوتر :: الميكروكونترولر PIC والبرجة بلغة السى والمترجم مسكروسى برو :: الميكروكونترولر PIC والبرمجة بلغة السى والمترجم ميكروسى برو

أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الثلاثاء فبراير 18, 2014 11:48 am
قبل شرح أبنية الميكروكونترولر ، فإنه من المفيد أن ننظر إلى أجزاء الميكروكونترولر بمزيد من التفصيل وفهم بعض المصطلحات الأساسية .
فيما يلى المصطلحات الأساسية مرتبة ترتيبا أبجديا :
1- العنوان Address:
"العنوان" هو "النموذج الثنائى الذى يستخدم لتمثيل مواقع أو أماكن الذاكرة" . و"ناقل العنوان address bus " هو عبارة عن "مجموعة خطوط فى المعالج" . على سبيل المثال ، فإن معظم الميكروكونترولر 8-bit لديها ناقل عنوان 16-bit ، قادر على معالجة ما يصل إلى 65536 موقع من مواقع الذاكرة المختلفة ( من 0 إلى 65535 ) .
2- وحدة الحساب والمنطق ALU :
وحدة الحساب والمنطق ALU هى جزء من جهاز الكمبيوتر حيث يتم تنفيذ العمليات الحسابية والمنطقية . الميكروكونترولر 8-bit يمتلك وحدة حساب ومنطق 8-bit . العمليات النموذجية التى تنفذ بواسطة وحدة الحساب والمنطق هى : الجمع ، والطرح ، والقسمة ، والمنطق AND ، والمنطق OR والمنطق Ex-OR والمقارنات . بعض وحدات الحساب والمنطق يمكنها أيضا أن تؤدى عملية الضرب بإشارة أو بدون إشارة .
3- المقارن التماثلى Analogue Comparator :
بعض الميكروكونترولر تمتلك ضمن بناؤها الداخلى وحدات مقارنة تناظرية . تستحدم وحدة المقارنة التناظرية لمقارنة مستويات الجهد لاثنين من الإشارات التناظرية . على الرغم من أن هذه الميزة موجودة فى معظم الميكروكونترولر PIC عائلة المدى المتوسط ، إلا أنها وظيفة غير هامة .
4- المحول من تناظرى إلى رقمى Analogue-to-Digital Converter :
يستخدم المحول من تناظرى لرقمى A/D لتحويل إشارة الدخل التناظرية إلى شكل رقمى ، بحيث يمكن معالجة الإشارة داخل الميكروكونترولر . معظم الميكروكونترولر PIC من العائلة متوسطة المدى تمتلك وحدات تحول من تناظرى إلى رقمى . فى تطبيقات الأغراض العامة والتطبيقات منخفضة السرعة ، تكون المحولات من تناظرى إلى رقمى بسعة من 8-bit أو 10-bit ، ليكون لديها مستويات كمية بمقدار 256 أو 1024 على الترتيب . المحول من تناظرى إلى رقمى يمكن أن يكون أحادى القطبية أو ثنائى القطبية . المحول أحادى القطبية يمكن أن يتعامل فقط مع الإشارت التى تكون دائما موجبة . المحولات الثنائية ، فى المقابل ، يمكن أن تتعامل مع كل من الإشارات الموجبة والسالبة . المحولات من تناظرى إلى رقمى الموجودة فى الميكروكونترولر PIC من النوع أحادى القطبية . يتم بدء عملية التحويل من تناظرى إلى رقمى بواسطة برنامج المستخدم والتحويل يمكن أن يستغرق عشرات من دورات المعالج لكى يتم . برنامج المستخدم يكون لديه خيار إما اختبار حالة التحويل (طريقة "الاستطلاع" polling ) والانتظار حتى اكتمال التحويل ، أو بدلا من ذلك يمكن تمكين المقاطعة عند اكتمال التحويل لتوليد مقاطعة بمجرد اكتمال عملية التحويل .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -

رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الثلاثاء فبراير 18, 2014 6:34 pm
5- كاشف هبوط الجهد Brown-out Detector :
كاشف هبوط الجهد فى الميكروكونترولر هو الميزة (الخاصية) التى يمكن تهيئتها لعمل إعادة reset للميكروكونترولر إذا انخفض جهد مصدر القدرة إلى أقل من القيمة الاسمية (المقننة) . كاشف هبوط الجهد هى ميزة سلامة (أمان) ، لأنه يحمى بيانات الميكروكونترولر أو البرنامج من التعرض للتلف أثناء العمل أسفل جهد المنبع الموصى به .
6- الناقل Bus :
الناقل عبارة عن مجموعة من الأسلاك مجمعة معا تبعا لوظيفتها . المعالج الدقيق التقليدى 8-bit عادة يمتلك ثلاث ناقلات ، ناقل العنوان ، وناقل البيانات ، وناقل التحكم . يتم إرسال عنوان الذاكرة والدخل – الخرج عبر ناقل العنوان أحادى الاتجاه . ويتم إرسال البيانات والتعليمات من الذاكرة عبر ناقل البيانات ثنائى الاتجاه . ويتم إرسال إشارات تحكم المعالج عبر ناقل التحكم أحادى الاتجاه . بعض المعالجات الدقيقة تمتلك ناقل دخل – خرج إضافى ، حيث يتم إرسال عناوين أجهزة الدخل والخرج .
 " />
" />7- ناقل CAN :
يستخدم ناقل CAN(Control Area Network) فى صناعة وسائل النقل (مثل السيارات) . بعض الميكروكونترولر تتضمن وحدات ناقل CAN ، والتى تبسط تصميم المنتجات القائمة على ناقل CAN . على سبيل المثال الميكروكونترولر PIC18F4680 يوفر واجهة للناقل CAN .
8- الكمبيوتر ذو التعليمات المعقدة CISC :
فى بناء هذا النوع من الكمبيوتر يكون كل من البيانات والتعليمات بنفس العرض ( على سبيل المثال بعرض 8-bit) وعادة ما يكون للميكروكونترولر أكثر من 200 تعليمة . وتكون البيانات والتعليمات على نفس الناقل ولا يمكن جلبهما فى نفس الوقت .
9- الساعة Clock :
"الساعة" هى فى الأساس إشارة موجة مربعة تستخدم لتوفير إشارات التوقيت للمعالج الرقمى . يتم توليد الساعة إما باستخدام أجهزة خارجية ( مثل الكريستال ، والمقاومة – المكثف وغيرها ) ، أو داخليا ، فى بعض الميكروكونترولر تمتلك ضمن بناؤها الداخلى دوائر توليد الساعة . عائلة الميكروكونترولر PIC18F يمكن أن تعمل مع ترددات ساعة تصل إلى 40MHz . دورة التعليمة الأساسية فى الميكروكونترولر PIC تستغرق أربع دورات للساعة . وبالتالى فإن تردد التشغيل الفعال يساوى تردد الساعة مقسوم على أربعة أى يكون 10MHz أو 10MIPS ( 10 مليون تعليمة كل ثانية ) .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الثلاثاء فبراير 18, 2014 6:56 pm
10- وحدة المعالجة المركزية CPU :
وحدة المعالجة المركزية CPU هى دماغ (مخ) نظام الكمبيوتر ، ولإدارة جميع الأنشطة بالنظام ، ولتنفيذ جميع العمليات على البيانات .
تتكون وحدة المعالجة المركزية من : وحدة الحساب والمنطق ALU ، والعديد من السجلات ، ومنطق التحكم والتزامن . تقوم وحدة المعالجة المركزية "بجلب" التعليمات من الذاكرة ، و "فك شفرة" هذه التعليمات ، وفى النهاية "تنفيذ" هذه التعليمات . فك شفرة التعليمة هو عملية تحديد ( تقرير) أى من إشارات التحكم يتم إرسالها إلى الأجزاء الداخلية الأخرى للكمبيوتر من أجل التنفيذ الناجح للتعليمة .
11- ذاكرة القراءة فقط القابلة للمحو والبرمجة كهربائيا EEPROM :
ذاكرة EEPROM هى ذاكرة ثابتة غير متطايرة والتى يمكن محوها وبرمجتها باستخدام جهاز البرمجة المناسب .
تستخدم ذاكرة EEPROM فى الأنظمة المبنية على الميكروكونترولر لتخزين البيانات "الشبه دائمة" ، مثل بيانات التكوين (التهيئة) ، والقيم القصوى والدنيا ، وبيانات تحديد الهوية ، وهلم جرا .
معظم الميكروكونترولر PIC تمتلك ضمن بناؤها الداخلى ذاكرات EEPROM . أحد عيوب هذه الذاكرة هى البطء الشديد فى زمن الكتابة عليها عن زمن القراءة منها .
12- ذاكرة القراءة فقط القابلة للمحو والبرمجة EPROM :
الذاكرة EPROM يمكن برمجتها ومحوها . شريحة ذاكرة EPROM بها نافذة (فتحة) صغيرة من الزجاج الشفاف على الجزء العلوى من الشريحة ، حيث يمكن "محو" البيانات تحت ضوء الأشعة فوق البنفسجية القوية فى بضع دقائق . يتم "برمجة" ذاكرة EPROM بواسطة إدراج الشريحة فى سوكيت جهاز برمجة EPROM ، والذى يتم توصيله بجهاز الكمبيوتر . بعد برمجة الشريحة ، يمكن تغطية النافذة بشريط لاصق معتم (مظلم) للحماية من المحو العرضى للبيانات ، على سبيل المثال تحت أشعة الشمس المباشرة . يجب محو شريحة ذاكرة EPROM قبل أن يمكن إعادة برمجتها . تستخدم ذاكرات EPROM عادة خلال وقت إنشاء (تطوير) البرنامج حيث يظل البرنامج فى حالة تغيير حتى الوصول إلى الشكل النهائى . بعض إصدارات ذاكرة EPROM يعرف باسم OTP ( قابل للبرمجة لمرة واحدة) ، والذى يمكن برمجته مرة واحدة فقط ولا يمكن محوها (بدون نافذة) .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الثلاثاء فبراير 18, 2014 9:46 pm
واجهة الإثرنت تمكن الميكروكونترولر من التوصيل إلى شبكة المنطقة المحلية LAN ، وبالإضافة إلى ذلك توفر قدرات واجة الإثرنت . الميكروكونترولر بمثل هذه الواجهة يمكن توصيله إلى شبكة الإنترنت ويمكن أن يرسل ويستقبل الحزم المستندة على البروتوكول TCP/IP . بعض الميكروكونترولر ، مثل PIC18F97J60 ، تمتلك ضمن بنائها الداخلى قدرات الإثرنت .
14- ذاكرة الفلاش Flash Memory :
ذاكرة الفلاش هى ذاكرة ثابتة غير متطايرة تستخدم أساسا لتخزين "برامج المستخدم" . هذا النوع من الذاكرة يمكن برمجته كهربائيا وهو موجود على اللوحة . بعض الميكروكونترولر يمتلك فقط 1KB (كيلوبايت) من ذاكرة الفلاش ، فى حين أن البعض الآخر يمكن أن يمتلك 32KB أو أكثر . بالإضافة إلى الكمبيوترات ، تستخدم ذاكرة الفلاش أيضا فى الهواتف المحمولة والكاميرات الرقمية .
15- إسلوب البناء "هارفارد" Harvard Architecture :
وهو نوع من وحدة المعالجة المركزية حيث تكون وحدات "ذاكرة البرنامج" و "ذاكرة البيانات" و "الناقلات" فى شكل منفصل . النتيجة هى أن المعالج يمكنه "جلب" التعليمات و البيانات فى نفس الوقت ، وبالتالى زيادة الأداء . العديد من الميكروكونترولر ، بما فى ذلك عائلة PIC ، مصممة باستخدام إسلوب البناء "هارفارد" .

Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الثلاثاء فبراير 18, 2014 10:22 pm
هذا الوضع يشبه وضع "النوم" ويستخدم للحفاظ على القدرة . فى وضع الخمول ، يتم فصل off المذبذب الداخلى ولكن الأجهزية الطرفية تكون فى وضع توصيل on .
17- المقاطعات Interrupts :
المقاطعات تتسبب فى أن الميكروكونترولر يستجيب لأحداث "خارجية" أو "داخلية" فى أقصر وقت ممكن . "المقاطعة الداخلية" غالبا ما تأتى من وحدة "المؤقت" ، حيث يمكن توليد المقاطعة كلما حدث "تجاوز" (طفح) overflow بالمؤقت . وبالتالى يمكن جدولة الأحداث لتحدث على فترات منتظمة .
"المقاطعة الخارجية"عادة ما تأتى من منافذ الدخل – الخرج للميكروكونترولر . على سبيل المثال ، يمكن تهيئة (تكوين) الميكروكونترولر لإنشاء مقاطعة عندما "يغير طرف بالمنفذ قيمة حالته" .
عند حدوث المقاطعة ، يترك الميكروكونترولر المسار العادى لتنفيذ البرنامج و"يقفز" إلى "روتين خدمة المقاطعة" ISR . عند هذه النقطة يتم تنفيذ التعليمات البرمجية (الكود) الموجود داخل روتين خدمة المقاطعة وفى نهاية هذا الكود يعود البرنامج ويستمر فى تنفيذ الكود من عند النقطة قبل حدوث المقاطعة تماما . روتين خدمة المقاطعة يكون عند "عنوان ثابت" بذاكرة البرنامج ، ويعرف "بعنوان متجه المقاطعة" . بعض الميكروكونترولر لديها أولوية قائمة على مصادر المقاطعة ، مع عناوين مختلفة لمتجه المقاطعة للمصادر المختلفة .
18- مشغلات شاشات LCD :
بعض الميكروكونترولر يقدم مشغلات شاشات LCD وواجة إشارات ، بحيث يمكن توصيل وحدات LCD مباشرة . ونظرا لأن جميع وظائف LCD يمكن تنفيذها برمجيا فإن مثل هذا الميكروكونترولر غير منتشر .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الأربعاء فبراير 19, 2014 10:28 am
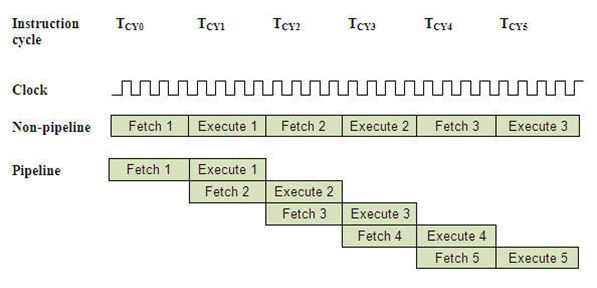
19- خطوط الأنابيب المتعددة Pipelining :
خطوط الأنابيب المتعددة هو إسلوب (تقنية) تستخدم فى أنظمة الكمبيوتر لكى "يتداخل أو يتراكب زمن جلب التعليمة مع زمن التنفيذ " . وهذا يسمح بإنتاجية أعلى مما لو تم تنفيذ العمليتين فى نفس الوقت (على التوازى) . فى الميكروكونترولر ، عموما يتم استخدام هذا الإسلوب "لجلب التعليمة التالية أثناء تنفيذ التعليمة الحالية". الميكروكونترولر PIC يستخدم إسلوب خطوط أنابيب ذو مرحلتين لتسريع زمن التنفيذ .
20- دائرة الإعادة عند توصيل القدرة Power-on Reset :
دائرة الإعادة عند توصيل القدرة تحافظ على الميكروكونترولر فى "حالة الإعادة reset " حتى يتم إعادة تهيئة جميع الدوائر الداخلية . وهذا يكون هام ، لأنه يضع ساعة (توقيت) الميكروكونترولر فى "حالة معروفة" . يمكن تمكين الإعادة عند توصيل القدرة أو تعطيل تمكينها أثناء برمجة الميكروكونترولر PIC .
21- ذاكرة القراءة فقط القابلة للبرمجة PROM :
هذه الذاكرة ثابتة غير متطايرة مثل ذاكرة القراءة فقط ROM . لكن ذاكرة PROM يمكن برمجتها بواسطة المستخدم النهائى بمساعدة جهاز برمجة PROM . ذاكرة PROM لا يمكن برمجتها إلا مرة واحدة ، ولا يمكن تغيير محتوياتها بعد برمجة الجهاز .
22- ذاكرة الوصول العشوائى RAM :
هذه الذاكرة هى ذاكرة قراءة وكتابة للأغراض العامة تستخدم لتخزين البيانات المؤقتة فى البرنامج . هذه الذاكرة غير ثابتة (متطايرة) حيث يتم مسح (فقد) البيانات المخزنة بها بعد فصل القدرة عنها . جميع الميكروكونترولر بها كمية من ذاكرة RAM ، البعض ليس به سوى بضع مئات من البايتات ، فى حين أن البعض الآخر به حتى 4 كيلوبايت أو أكثر .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الأربعاء فبراير 19, 2014 11:16 am
ساعة الزمن الحقيقى تمكن الميكروكونترولر من تلقى (استقبال) معلومات التاريخ والتوقيت المطلق . بعض الميكروكونترولر يتضمن بنائه الداخلى وحدة هاردوير لساعة التوقيت الحقيقى . بشكل عام ، يمكن توصيل شريحة "ساعة توقيت حقيقى" خارجية إلى منافذ الدخل – الخرج العام للميكروكونترولر لاستقبال معلومات التاريخ والتوقيت المطلق .
24- السجل Register :
السجل هو مخزن غير ثابت (متطاير) ، للتخزين المؤقت وبسرعة عالية للبيانات . جميع الميكروكونترولر بها كمية من السجلات . بعض الميكروكونترولر ، مثل عائلة PIC ، بها "سجلات وظائف خاصة" SFR ، تستخدم لاحتواء (لحفظ) بيانات التهيئة (التكوين) لمختلف وظائف الميكروكونترولر . على سبيل المثال ، "سجلات اتجاه الدخل – الخرج" TRIS تحتفظ باتجاه كل طرف دخل – خرج . وبالمثل ، "سجلات المنافذ" PORT تحتفظ بالبيانات المستقبلة من منفذ الدخل – الخرج ، أو البيانات المطلوب إرسالها إلى منفذ الدخل – الخرج .
25- إعادة التعيين Reset :
جميع الميكروكونترولر بها وسائل إعادة التعيين reset . فعل إعادة التعيين يمكن أن يكون أوتوماتيكيا بواسطة البرمجيات ، أو يمكن إعادة تعيين الميكروكونترولر باستخدام مفتاح ضاغط خارجى.
إعادة التعيين تضع الميكروكونترولر فى حالة معروفة . عادة ، بعد إعادة التعيين ، يتم تنفيذ البرنامج بدءا من عنوان الذاكرة صفر "0" بالميكروكونترولر .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الأربعاء فبراير 19, 2014 12:49 pm
فى الميكروكونترولر المبنى على أساس كمبيوتر مجموعة التعليمات المخفضة ، تكون "البيانات" و "التعليمات" عادة ليست بنفس العرض . على سبيل المثال ، فى الميكروكونترولر 8-bit بناء RISC : البيانات بعرض 8 بت ولكن التعليمات يمكن أن تكون بعرض 12 أو 14 أو 16 بت . الميكروكونترولر بناء RISC لديها عدد محدود من التعليمات ( على سبيل المثال ، لا تزيد عن 50 تعليمة ) .
27- ذاكرة القراءة فقط ROM :
ذاكرة القراءة فقط ROM هى ذاكرة ثابتة ، ةتستخدم لتخزين "برامج المستخدم". عادة يتم برمجة ROM فى المصنع خلال عملية التصنيع . ذاكرة ROM غير قابلة لإعادة البرمجة ولا يمكن محو محتوياتها . عادة تستخدم ذاكرة ROM عندما يكون قد تم اختبار البرنامج ويعمل بشكل صحيح ، ويكون مطلوب عمل الآلاف من النسخ من نفس البرنامج .
28- الدخل – الخرج التسلسلى Serial Input-Output :
المنفذ التسلسلية بالميكروكونترولر تمكن الاتصال باستخدام البروتوكول RS232 . على سبيل المثال ، يمكن توصيل الميكروكونترولر بجهاو كمبيوتر عبر منفذه التسلسلى ومن ثم يمكن تبادل البيانات بين الميكروكونترولر و جهاز الكمبيوتر . على الرغم من أنه يمكن تنفيذ الاتصال التسلسلى برمجيا ، إلا أن معظم الميكروكونترولر يكون ضمن بنائها الداخلى وحدة اتصال تسلسلى نوع USART لقراءة وكتابة البيانات التسلسلية من خلال منافذها . معظم الميكروكونترولر PIC للمدى المتوسط مجهز بوحدة USART واحدة على الأقل .
29- وضع السكون Sleep Mode :
بعض الميكروكونترولر يتضمن بنائها الداخلى وضع السكون حيث ، فى هذا الوضع ، يتم إيقاف المذبذب الداخلى . السبب لاستخدام هذا الوضع هو الحد من استهلاك القدرة إلى مستوى منخفض للغاية . فى هذا الوضع تكون جميع الدوائر الداخلية للميكروكونترولر والأجهزة الطرفية فى حالة فصل off . عادة ما يستيقظ الميكروكونترولر من وضع السكون عن طريق إعادة التعيين reset خارجيا أو داخليا عن طريق المقاطعة نتيجة "إنقضاء وقت أو مهلة الحراسة" .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
رد: أجزاء الميكروكونترولر والمصطلحات الأساسية:
من طرف Admin الأربعاء فبراير 19, 2014 2:03 pm
30- جهد التغذية Supply Voltage :
معظم الميكروكونترولر تعمل مع جهد المنطق القياسى 5V . مدى الجهد المقبول يكون عادة فى المدى من 4.75V إلى 5.25V . عادة تعطى الداتا شيت الخاصة بالصناع الحدود المقبولة لجهد التغذية . الميكروكونترولر PIC18F يمكن أن يعمل بجهد تغذية من 2V إلى 5.5V . عادة ما يتم الحصول على جهد التغذية المطلوب باستخدام جهد تغذية منظم . فى التطبيقات النحمولة ، يتم الحصول على جهد التغذية 5V باستخدام بطارية 9V مع منظم جهد 5V ( على سبيل المثال المنظم 78L05 ) .
31- المؤقتات Timers :
تستخدم المؤقتات فى تطبيقات "التوقيت" و "العد" . معظم الميكروكونترولر مجهزة بمؤقت واحد على الأقل ، وفى كثير من الحالات ، بالعديد من المؤقتات . عادة يكون المؤقت بعرض 8 بت أو 16 بت . يتم تحميل البيانات إلى المؤقت تحت سيطرة البرنامج . يقوم المؤقت بالعد عند كل نبضة ساعة (أو فى كل مرة يحدث حدث خارجى) ، وعندما يتجاوز (يطفح) overflow المؤقت يتم توليد مقاطعة ( إذا تم تمكين المقاطعات) . أحد التطبيقات الشائعة للمؤقتات هو توليد التأخير فى البرامج ، أو جدولة الأحداث عند فترات منتظمة .
32- منفذ USB :
المنفذ USB هو منفذ قوى للاتصالات عالية السرعة يستخدم لربط مختلف الأجهزة معا . بعض الميكروكونترولر يحتوى بنائه الداخلى على وحدات USB ، والتى تبسط الاتصالات القائمة على برتوكول USB . على سبيل المثال ، الميكروكونترولر PIC18F2X50 به وحدة USB ضمن بنائه الداخلى .
33- مؤقت الحراسة Watchdog :
مؤقت الحراسة Watchdog هو فى الأساس دائرة مؤقت قابل للبرمجة والتى يمكن تحديثها بواسطة برنامج المستخدم . عادة ما يتم استخدامه فى "التوقيت الحقيقى" ، و التطبيقات القائمة على التوقيت حيث تستخدم "وحدات التوقيت الحرج" بالبرنامج لتديث مؤقت الحراسة . إذا تحديث فشل مؤقت الحراسة ، يكون ذلك علامة على أن وحدة الزمن الحرج لم تكمل مهمتها . أتوماتيكيا يحدث إعادة تعيين برمجيا إذا ما تم تمكين مؤقت الحراسة ولكن لم يتم تحديثه . مؤقت الحراسة هو ميزة "أمان" ، تستخدم لكشف الحلقات والكود الشارد فى البرامج .
Admin- Admin
- عدد المساهمات : 1194
تاريخ التسجيل : 28/01/2014 -
» برمجة الميكروكونترولر PIC بلغة السى مع المترجم CCS C : المفاهيم الأساسية للغة السى :
» مراجعة برمجة الميكروكونترولر PIC من خلال مشاريع الميكروكونترولر PIC16F877A مع الدايودات المشعة للضوء والمترجم ميكروسى برو :
» ما هو الميكروكونترولر Microcontroller ؟
» مراجعة : اذكر مع الشرح ، ما هى المفاهيم الأساسية للبرمجة بلغة السى الموجودة فى هذا البرنامج البسيط ؟
منتديات الهندسة الكهربية والإلكترونية والميكاترونكس والكومبيوتر :: الميكروكونترولر PIC والبرجة بلغة السى والمترجم مسكروسى برو :: الميكروكونترولر PIC والبرمجة بلغة السى والمترجم ميكروسى برو